Welcome to my personal webpage. | home
Robotics | Mirocontrollers | Electronics | My Resume | photos | Favorite Links | Omni-Directional Cameras
Robotics
My robotic experience comprises two distinct approches to building and programming robots:
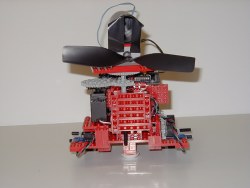
Z-1380 was an "intelligent" robot that was programmed in Interactive C language. It was a "Firefighting" robot that could find a candle in a predefined maze and put it out by using a fan mounted on top of it. This project was part of my ED & G100 class at Penn State Abington. I was the head of the programming team and our first concern was to find algorithms that work best the hardware and are efficient in practice.
A simple closed-loop system (negative feedback) was used to make sure that the robot proceeds in straight lines. The robot participated in 2 competitions in 2001. In the regional competition at Penn State Abington, Z1380 was the best robot in the Senior Division timely and functionally. For more information click here.
As part of the "Embedded Micro-controllers" class (EE 324) in Penn State University Park, me and 5 other EE students started working on a robot from scratch. The coding language was Assembly and the Microprocessor was Motorola 68HC11. The robot was radio controlled. The commends would be sent to the robot through an interface program written in Visual Basic and transmitted by the host PC and an HC11.
The robot could interpret the received commands and take the required action. For more information please click here.